文章摘要
【关 键 词】 灵巧手研发、高自由度技术、产线自研、量产推进、融资动态
曦诺未来作为一家2024年底成立的机器人执行器企业,已相继完成超亿元天使轮与数亿元Pre-A轮融资。本轮融资由头部互联网大厂领投,多类投资机构参与,老股东亦持续加码,资金将重点用于团队扩充、量产加速及商业化落地。该公司聚焦高自由度灵巧手、微型电缸与一体化关节模组的研发制造,具备从电机、电控、减速器到丝杠、算法的完整自主产研能力,是国内少数实现软硬件全链条自研自产的企业之一。
其核心技术路径为“臂手一体的高自由度腱绳技术方案”,以应对轻量化、高负载与高灵活性之间的平衡难题。去年8月推出全球首款全自研量产高自由度腱绳驱动灵巧手Xynova Flex 1,具备25个自由度、手掌仅380克重、负载超30公斤、单指指尖力超20N,被称作当前最轻与最强负载的同类产品;今年将迭代发布Xynova Flex 2,在控制精度与体积效率上实现显著提升。
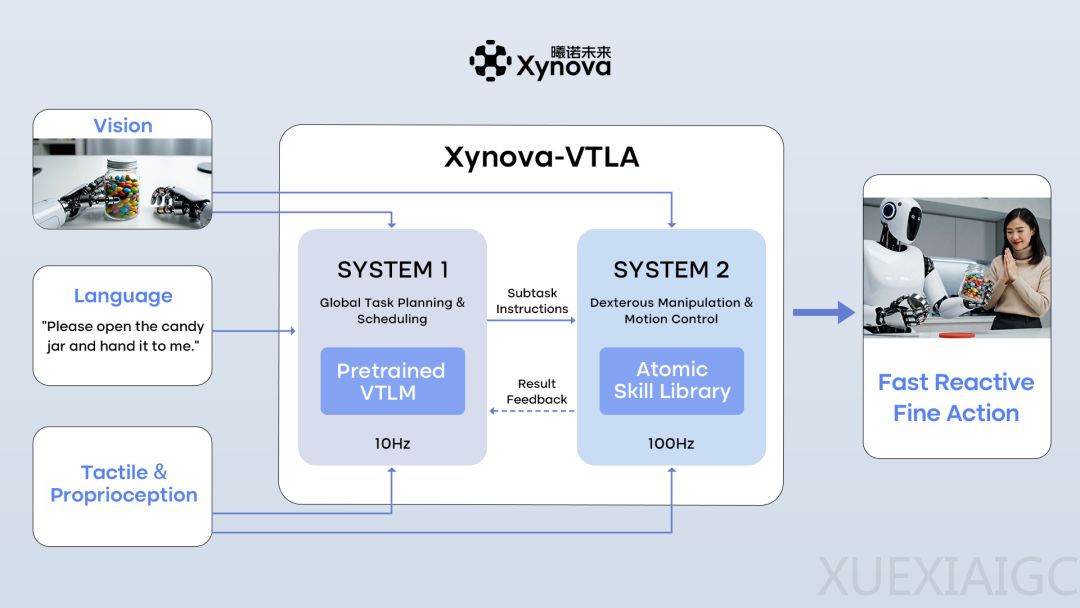
在软件层面,运控算法训练框架融合强化学习、模仿学习、仿真及真机数据,与多传感器深度耦合,构建工业级闭环控制系统;通过人类在环强化学习(HIL-RL)不断提升原子技能泛化性,覆盖抓取、插接、拧转等通用动作,支撑其在工厂、商用服务及家庭场景的应用潜力。
生产端,公司年初即启动量产筹备,引入消费电子与汽车行业经验丰富的管理人员,并正推进新工厂产能爬坡,目标年内形成超1万台灵巧手与20万台微型电缸的量产能力。该公司的整体技术布局呈现高度协同特征:结构设计—硬件制造—智能控制—系统集成—规模化交付形成闭环,体现出从技术突破走向产业化落地的清晰路径。目前灵巧手行业尚处于早期阶段,曦诺未来的量产准备进度明显领先同业,已进入关键落地窗口期。
原文和模型
【原文链接】 阅读原文 [ 876字 | 4分钟 ]
【原文作者】 机器人前瞻
【摘要模型】 qwen3-vl-flash-2026-01-22
【摘要评分】 ★☆☆☆☆


相关文章


