继宇树后,唯一获得三家大厂押注的自变量:具身模型不是把DeepSeek塞进机器人
文章摘要
【关 键 词】 具身智能、机器人、大脑模型、物理交互、自主操作
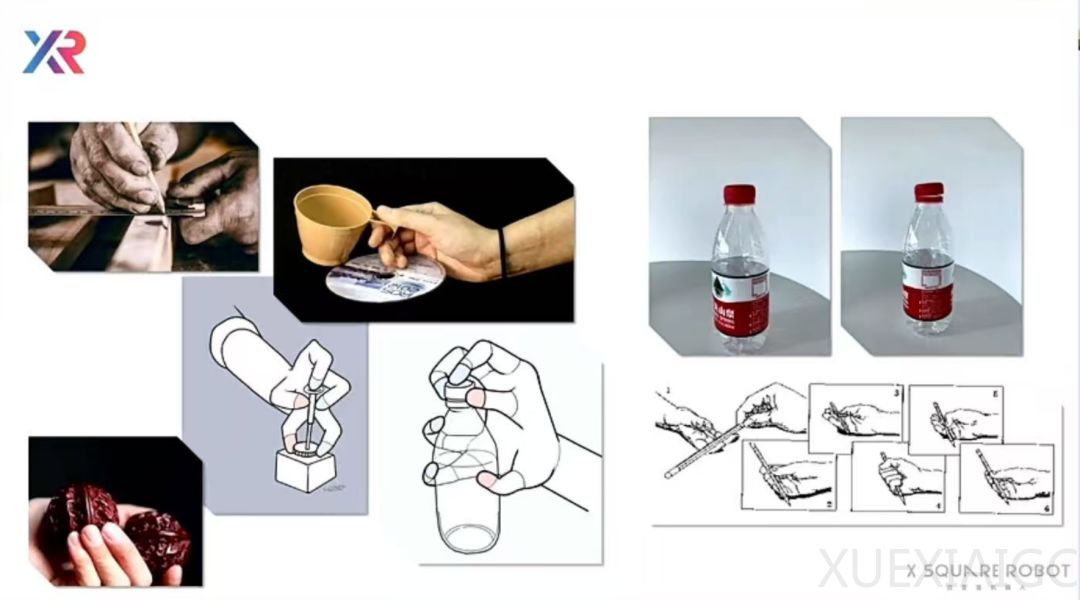
国内具身智能领域正迎来以”大脑”为核心的新竞争阶段。自变量机器人近期完成10亿元融资,其核心突破在于对机器人”大脑”的重新定义——不同于依赖语言或多模态模型的传统思路,他们提出需要构建专属于物理世界的独立基础模型。这种模型需处理操作任务中复杂的物理交互,其难点在于捕捉”看不见但影响行为”的细节差异,例如拧紧与未拧紧瓶盖在后续操作中产生的截然不同的物理效应。
物理世界的特殊性对智能系统提出了时序因果理解的要求。真实场景中的操作往往需要模型串联长时间跨度的感知-动作-结果链条,并能进行未来状态推演。现有基于静态信息训练的AI模型难以应对这种动态环境,因为其缺乏对物理规律的本质理解。自变量认为必须建立与语言模型平行的新型基础模型,这种模型需要从物理交互数据中直接学习,而非作为现有AI模型的下游应用。
在技术实现路径上,自变量强调端到端架构与通才模型两大原则。通过统一的信息处理空间,避免模块化架构造成的物理直觉损耗;通过多任务训练迫使模型发现物理世界的共性结构。其自研的WALL-A模型已展现出这种特性,不仅能控制机械臂,还能进行语言对话、环境重建和未来预测。在外卖配送场景中,该模型成功完成包含28个环节的超长操作序列,实现了实验室到商业场景的关键跨越。
自研基础模型被视为行业竞争的核心壁垒。尽管存在开源选择,自变量仍坚持自主构建从数据采集到模型架构的完整体系。这种选择源于对技术演进规律的洞察——如同语言模型领域所示,基础层的创新者往往掌握规则定义权。公司已推出WALL-A和轻量化版WALL-OSS两款核心模型,后者通过”具亮计划”开源以促进生态发展。
具身智能的发展本质上是在重构人类对物理世界的直觉理解。与语言模型不同,物理规律无法通过符号系统间接学习,必须通过实际交互积累经验。这种”重走婴儿路”的探索虽然缓慢,但可能更接近智能的本源形态。自变量在该领域的实践,标志着具身智能开始从演示阶段迈向真实场景落地的关键转折。
原文和模型
【原文链接】 阅读原文 [ 3384字 | 14分钟 ]
【原文作者】 机器之心
【摘要模型】 deepseek/deepseek-v3-0324
【摘要评分】 ★★★★★


相关文章


