AI 为什么不会规划?Yann LeCun团队:问题出在「时间是弯的」
文章摘要
【关 键 词】 世界模型、潜空间直道化、曲率正则、规划效率、神经科学启发
本文探讨了构建具备世界建模与规划能力的AI系统所面临的核心挑战,聚焦于潜在空间中时间轨迹的几何结构问题。研究指出,当前预训练视觉编码器在潜在空间生成的运动轨迹通常具有高曲率,导致欧几里得距离失效和规划过程不稳定——即“距离失效”与“规划不稳定”两个关键瓶颈。为解决这一问题,来自Meta与NYU的研究团队提出“时间直道化”(Temporal Straightening)方法,引入曲率正则化器以约束编码器输出的潜变量序列,在时间维度上强制形成近似匀速直线的演化轨迹。其核心数学机制是通过优化损失函数,确保相邻时间步的位移向量方向高度一致,从而将潜在空间中的动态过程映射为线性系统。该方法实现两大实质效益:在拉直后的潜空间中,欧几里得距离可等价替代测地距离,使状态转移成本计算更为精准;同时显著提升目标条件调节的稳定性,避免智能体陷入局部最优或逻辑断层。
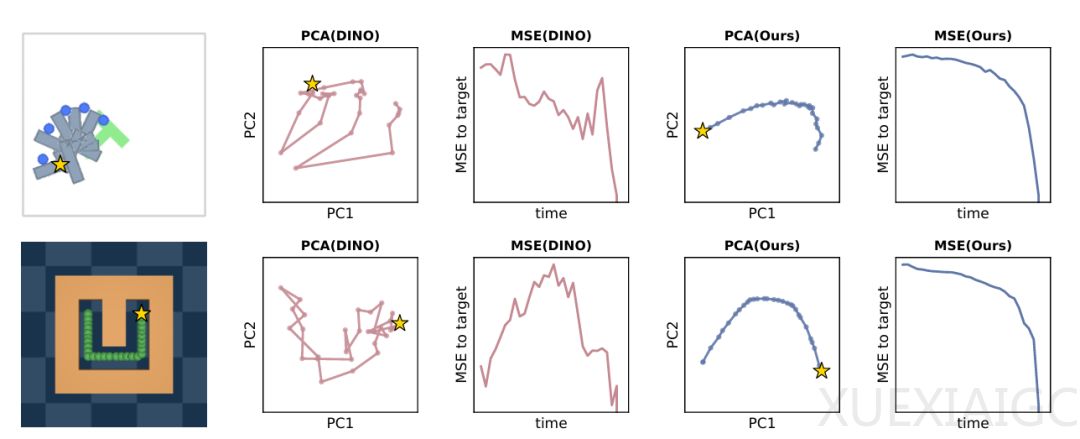
实验层面,研究在极具挑战性的Teleport-PointMaze(带传送门迷宫)环境中验证效果。传统编码器(如DINOv2)的潜在空间热力图呈现严重扭曲,无法反映真实拓扑关系,规划算法陷入“盲目搜索”;而经时间直道化处理的ResNet特征空间则展现出高度平滑的距离梯度分布,并与真值地标完美吻合,证明其能准确表征穿越传送门所需的最小路径步数。研究进一步表明,在相同编码器架构下,潜空间曲率越低(余弦相似度越高),开环梯度下降(GD)任务成功率同步提高,揭示几何结构优化对规划性能的直接正向影响。
本文呼应Yann LeCun长期倡导的世界模型研究路线,强调真正智能需依托于对物理世界建模与未来演化预测的能力。时间直道化为“世界模型”的工程实现提供了可操作性强、可量化检验的新范式,不仅适用于机器人控制与视频预测场景,也为未来自动驾驶、具身智能等系统设计提供基础支持。最终指出,“在一个优良的潜在空间中,时间轨迹应尽可能接近直线”这一简洁假设,已成为连接神经科学启发与AI规划能力的关键桥梁。让“时间变直”,可能正是通往理解并预测世界的模型的重要一步。
原文和模型
【原文链接】 阅读原文 [ 1998字 | 8分钟 ]
【原文作者】 机器之心
【摘要模型】 qwen3-vl-flash-2026-01-22
【摘要评分】 ★★☆☆☆


相关文章


