文章摘要
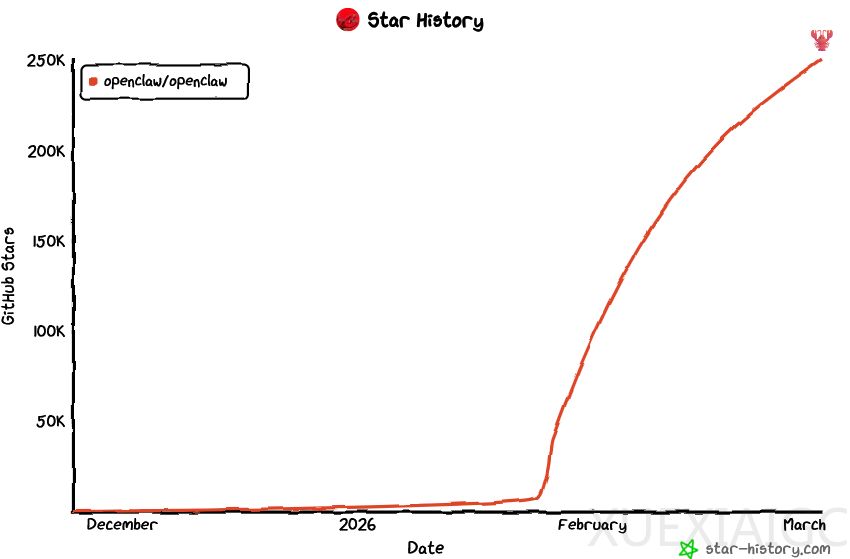
OpenClaw项目短短4个月突破25万+星,登顶GitHub成为史上获星最多的软件项目,速度远超React登顶所需的十几年积累,其核心增长动力来自智能体Skills,OpenClaw的爆火也推动Skills实现大范围普及。智能体Skills给大模型装上了可沉淀、可复用的程序化记忆,解决了大模型缺乏程序化记忆,每次处理同类问题都要在有限上下文窗口重新推导的瓶颈,让智能体可完成浏览网页、编写代码、团队协作等复杂任务,同时规模化生成分发的Skills也带来了巨大安全隐患。悉尼科技大学与CSIRO Data61的研究者全面解构智能体Skills这一核心概念,梳理了其内部结构、完整生命周期与真实系统中的七大设计模式,剖析了规模化应用的安全威胁,并指明可验证自主智能体的发展路径。
从结构上,Skills由适用条件、执行策略、终止条件、可复用接口四个不可或缺的核心组件构成,形成从触发到结束的完整逻辑闭环。相比单次调用工具、临时规划、情景记忆、提示词模板等同类概念,智能体Skills兼具持续进化和随时调用的双重特性,继承了古典AI的分层任务网络、BDI架构等前瞻性思想,以自然语言替代了僵化的符号逻辑。Skills拥有类似生物循环的完整生命周期,从规律提取到练习提炼封装,再到存储检索编排、执行、评估更新,形成生生不息的循环体系。基于工程实践提炼出七大核心设计模式,不同模式沿着自主性从人类主导到机器自驱的光谱排布,在上下文成本、确定性和可组合性上各有优劣,生产环境的成熟系统多融合多种模式应对复杂需求。
Skills的获取路径形成了从人工投喂到机器自主进化的清晰脉络,调度依托层级嵌套编排机制,当前主流有基于嵌入的向量检索和大模型内建推理两种方案,但技能冲突的解决机制仍不完善,是待突破的学术难题。Skills规模化应用带来了致命的供应链安全威胁,OpenClaw平台曾发生ClawHavoc安全事件,超千个伪装的恶意Skills大范围窃取用户LLM凭证和数字钱包密钥,传统安防手段对此完全失效。现有研究提出四层信任防御模型,指出需开发基于Skills元组深度解析的原生审计工具。业界已建立多维度客观评价体系,实测证实优质人工策展的Skills可大幅提升任务成功率,甚至能抹平算力鸿沟,让装配精选Skills的小模型性能超过无Skills加持的大模型,而未经检验的自主生成Skills反而会降低任务成功率。当前通往完全自主智能体仍有多个核心问题待突破。
原文和模型
【原文链接】 阅读原文 [ 4024字 | 17分钟 ]
【原文作者】 AIGC开放社区
【摘要模型】 doubao-seed-2-0-lite-260215
【摘要评分】 ★★★☆☆


相关文章


