文章摘要
【关 键 词】 越障能力、三维运动、底盘进化、智能清洁、空间适应
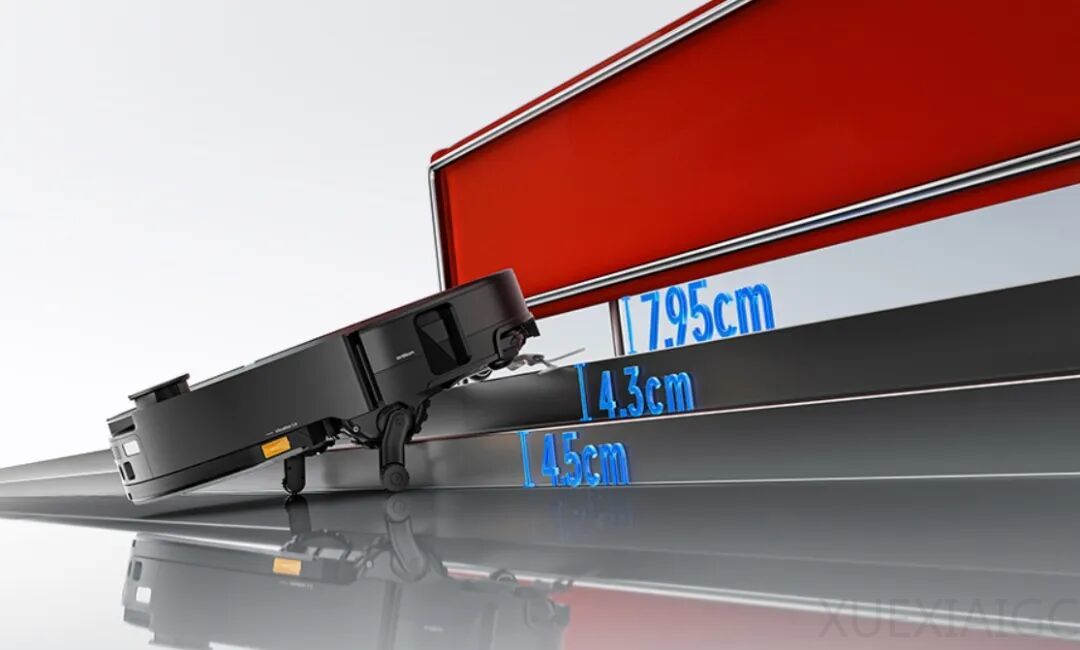
扫地机器人长期受限于二维平面移动逻辑,面对几厘米高的门槛、滑轨或低矮家具底部时普遍停滞不前,导致家庭清洁存在固定“禁区”。石头G30S Pro在AWE 2026现场演示中,通过全新底盘升降3.0 AI轮足系统实现8.8cm双层越障(如4.5cm门槛+4.3cm台阶),其仿生关节与360°摆臂结构使整机可主动调整姿态跨越障碍,首次赋予扫地机器人类似移动机器人的三维运动能力。该系统整合RGB摄像头与三线结构光进行障碍识别,结合AI决策执行抬升、探伸、后退等复合动作,并将单次越障经验自动记录于App用于后续路径优化,使越障行为从临时应对转变为可学习复用的能力。这标志着行业十年来最重大的底盘结构进化,突破了“抬高即通过”的传统逻辑,转向基于环境感知的主动姿态控制。
针对“进不去”问题,G30S Pro采用后置升降LDS设计:进入低矮空间(如床底、沙发底)时,激光雷达模组自动下降收纳,整机高度降至7.95cm,同时通过110°后窗视角维持定位精度,首次在不牺牲导航性能前提下实现高越障与超薄穿越的统一,解决了长期存在的硬件零和博弈。清洁系统方面,双机械臂边刷实现100%墙角覆盖与贴边<1mm拖洗;35000Pa飓风瞬吸搭配DuoDivide双悬臂对刷及智能差速齿轮箱,以“卷-聚-剥-吸”物理机制实现0缠绕;四区双震拖布提供14N下压力与4000次/分钟高频震动,结合基站100℃动态热水洗布,显著提升顽固污渍清除效率。
智能化层面,RRmind GPT大模型支持自然语言指令理解与自主决策;感知系统可识别超280种障碍物,并据此动态调整策略——如遇咖啡粉启用高吸力清扫,遇酱料类污渍则调控水量防扩散。从障碍识别、姿态调整、清洁执行到策略优化,G30S Pro构建了完整的感知-决策-执行闭环,推动产品从程序化清洁工具向能理解环境并主动响应的家庭机器人演进。行业竞争焦点已由吸力、传感器数量等参数转向真实场景下的空间通过性与系统协同能力,G30S Pro所代表的技术路径凸显:智能家电的核心进步,在于机器能否真正适配复杂多变的家庭物理环境,而非要求人迁就设备限制。
原文和模型
【原文链接】 阅读原文 [ 3960字 | 16分钟 ]
【原文作者】 极客公园
【摘要模型】 qwen3-vl-plus-2025-12-19
【摘要评分】 ★★★☆☆


相关文章


