文章摘要
【关 键 词】 MedOS、医疗AI、手术辅助、认知系统、效能提升
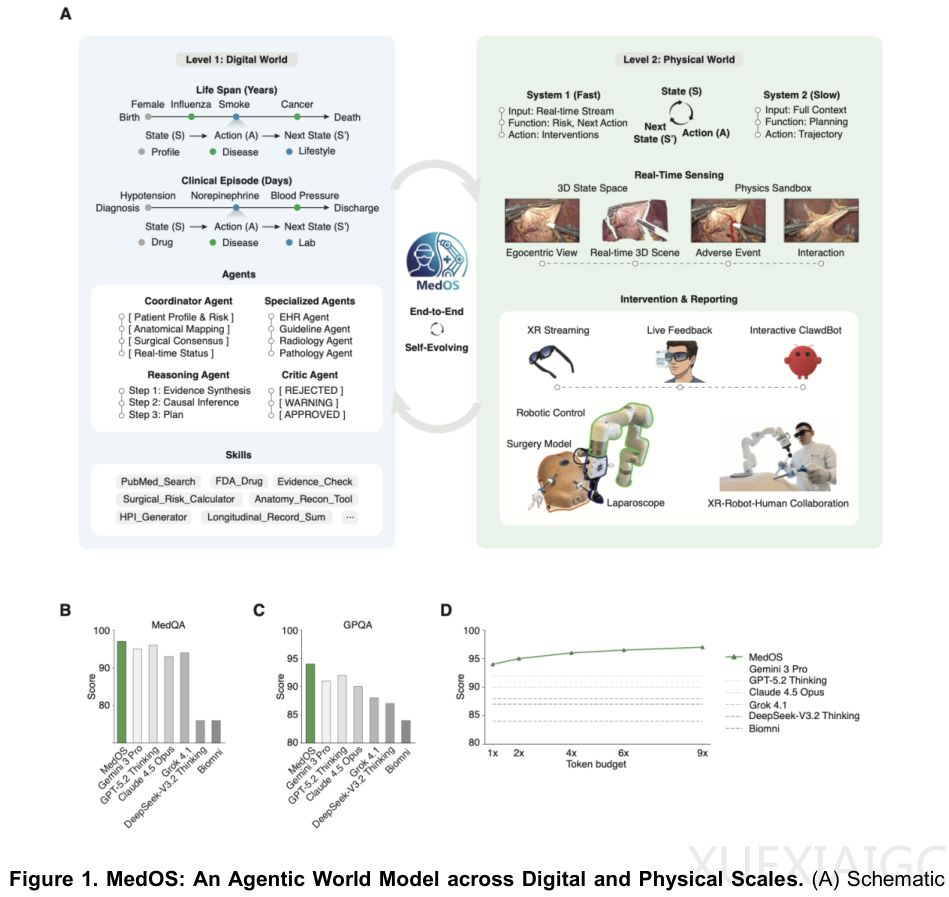
医学界长期存在临床推理与物理干预分离的痛点,现有医疗AI多局限于数字世界处理静态影像、电子病历等数据,无法感知手术动态变化并做出实时响应,而外科手术机器人仅能执行预设指令,缺乏对人体解剖环境的理解,二者存在明显的能力断层。斯坦福大学与普林斯顿大学联合推出通用医疗具身世界模型MedOS,模仿人类大脑双系统认知机制,构建横跨数字与物理尺度的统一架构,填补医学理论与物理操作的鸿沟。
MedOS搭载分层认知系统,数字场景下启动慢思考模式,可梳理患者全周期病历数据、识别潜在疾病风险、制定低损伤的精细化手术方案;进入手术物理场景后自动切换为快思考模式,通过扩展现实流媒体和机器人控制接口,实时构建包含第一人称视角与深度信息的手术立体状态空间,预判牵拉撕裂等操作风险,即时指挥机械臂调整操作动作。系统由多层智能体网络支撑,在医学问答基准MedQA测试中准确率达97%,在研究生水平通用问答基准GPQA测试中得分达94%,表现远超Gemini 3 Pro、GPT-5.2 Thinking等前沿大模型。人机协作测试显示,在系统辅助下,注册护士诊断准确率从49%提升至77%,医学生诊断准确率达91%,低经验医护人员能力可匹敌甚至超越主治医师的独立表现,还可辅助疲劳状态医生恢复判断力、支撑医生跨学科诊疗,同时能自主完成不良事件分析、肿瘤基因组研究等全流程临床科研任务。
团队配套构建包含85398分钟专家标注手术视频的MedSuperVision数据集,训练出具备空间物理直觉的极速视觉引擎,可还原手术视野立体结构、精准拆解操作受力向量,还能通过序列数据预判血管破裂、牵引力过大等医疗事故,在仪器召回、接触检测等毫秒级高频手术任务上表现全面碾压通用基础大模型。系统控制微创手术机械臂时,可彻底消除人类生理性震颤带来的操作误差,稳定性远超过初级医生;配套的扩展现实协作环境可在手术中为医生提供实时导航和风险预警,大幅提升手术完成效率,同时可生成高保真的患者器官三维数字孪生场景,为医护人员提供无真人风险的手术演练平台,推动医学技术从单纯诊疗辅助正式跨入实体干预新纪元。
原文和模型
【原文链接】 阅读原文 [ 2989字 | 12分钟 ]
【原文作者】 AIGC开放社区
【摘要模型】 doubao-seed-2-0-pro-260215
【摘要评分】 ★★★☆☆


相关文章


