文章摘要
【关 键 词】 具身智能、世界模型、因果推理、物理智能、范式变革
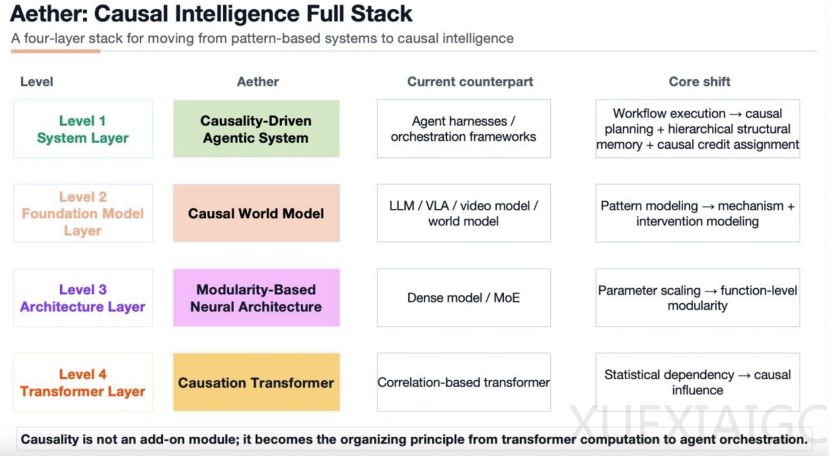
具身智能机器人在真实物理环境中常面临泛化能力不足的瓶颈,其根本原因在于现有技术多依赖数据表层的相关性而非底层因果性。为解决这一问题,因果世界模型成为构建具身大脑的重要方向,旨在让机器人真正理解物理世界的底层机制与演化规律。 Aether AI公司专注于研发该技术,通过因果变量提取、因果结构学习以及因果动力学建模,使机器人能够探究现象背后的成因,而非仅仅预测后续可能发生的事件。
因果世界模型通过显式学习因果变量与动力学,试图以较少的数据实现更强的泛化能力,从而突破传统相关性模型在物理场景中的局限。 传统视频生成、3D生成或JEPA等技术路线在精准控制、动态交互及因果变量拆解方面存在明显缺失。相比之下,因果模型不仅关注状态的转移,更探究事物交互的原理。在实际应用的数据验证中,因果世界模型在机器人操作任务上实现了显著的成功率提升与样本效率飞跃,仅凭少量高质量数据即可达成可靠的操作效果,展现出极高的数据利用效率。
Aether AI致力于推动人工智能向以因果性大模型为核心的下一代范式演进,旨在打破现有相关性大模型在数据需求和场景泛化上的天花板。 物理世界充满隐变量且需要干预操作,仅靠预测机制无法应对复杂的物理交互。该团队依托深厚的因果发现学术积淀,构建了从底层基础模型到顶层智能体系统的全栈因果架构。资本市场对该公司的融资支持,反映了对这种非共识技术路线及潜在范式颠覆的押注。若因果基础模型能成功转化为可量化的商业壁垒,将深刻改变具身智能的发展格局。
原文和模型
【原文链接】 阅读原文 [ 3365字 | 14分钟 ]
【原文作者】 量子位
【摘要模型】 qwen3.7-plus
【摘要评分】 ★★★★☆

© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章

暂无评论...

