文章摘要
【关 键 词】 智能体、概率框架、多智能体、马尔可夫链、协作成本
Google Cloud AI团队通过数学推演将智能体设计从经验主义提升为可量化的系统工程。统一的概率框架揭示了智能体本质是最大化执行特定动作的概率以实现目标的过程。这一突破性研究为开发者提供了精确调控智能体的理论基础,标志着该领域从”炼金术”阶段迈向工程化阶段。
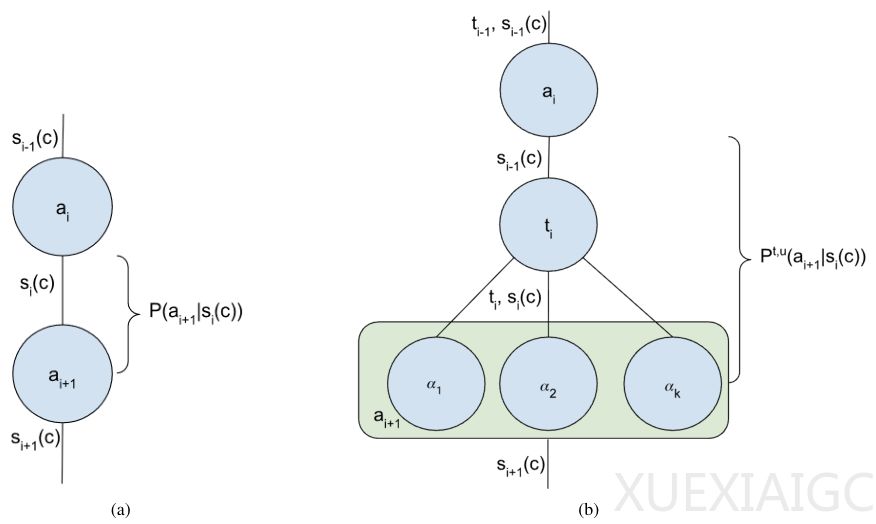
马尔可夫链模型清晰地展现了智能体运行的数学本质。每个动作选择都基于当前上下文和状态的概率分布,形成一条概率锁链。分析指出ReAct模式存在根本缺陷,其随机游走特性导致长任务链的概率呈指数级衰减,这正是单体智能体在处理复杂任务时不稳定性的根源。控制流架构通过预定义图结构限制动作空间,将长链条拆解为高概率子链条,显著提升了可靠性。
研究引入的”自由度”概念极具启发性。多智能体系统通过协作概率这一全新自由度,实现了运行时动态优化成功率的能力。智能体间的交互实质是在高维概率空间中进行联合搜索,通过上下文协商找到局部最优解。这种机制无需重新训练模型,就能让系统自适应地处理未见过的任务。智能体间的沟通本质是自动化提示词工程,通过反复调整直到成功率达标。
协作机制虽然强大但也存在代价。修正后的目标函数引入协作成本作为正则化项,需要在成功率与资源消耗间寻找平衡点。研究强调优秀架构应具备自适应能力,根据任务复杂度动态调节协作强度。这一理论框架不仅解释了现有技术的优缺点,更为未来自动化设计指明了方向,包括自动搜索最优拓扑结构和运行时自我进化等可能性。
原文和模型
【原文链接】 阅读原文 [ 2870字 | 12分钟 ]
【原文作者】 AIGC开放社区
【摘要模型】 deepseek/deepseek-v3-0324
【摘要评分】 ★★★★☆

© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章

暂无评论...

