光轮智能与谷歌、英伟达共同定义物理AI仿真标准
文章摘要
【关 键 词】 物理仿真、具身智能、数据瓶颈、开源底座、标准定义
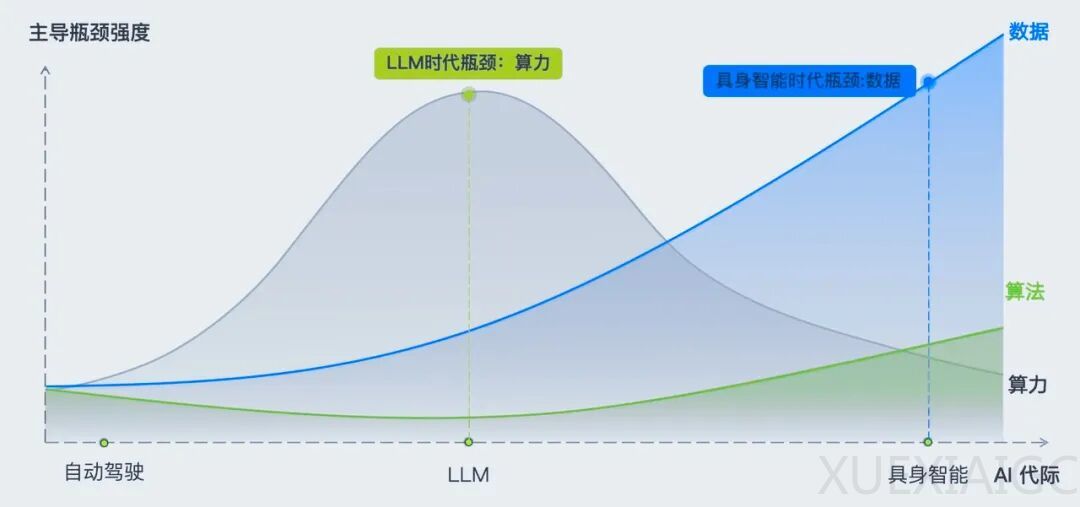
过去十年AI产业的核心制约因素为硬件算力,而未来物理智能的演进关键将转向高质量数据。缺乏可规模化的虚拟环境与统一协议,便无法建立可持续发展的物理智能生态。相较于文本语言模型,实体机器人必须掌握真实空间中的力学传导、接触反馈与运动执行,相关训练资源仅能通过高拟真交互场景批量制造。传统数据采集路径失效,且实验室指标无法映射现实复杂工况,促使可重复、并行化的能力评估体系深度绑定仿真技术。该技术由此升格为数据供给与模型验证的底层基石。
国际头部科技企业已通过投资研发抢占仿真架构主导权。NVIDIA、DeepMind与Disney等机构联合发布开源物理仿真框架Newton,彻底打通GPU并行加速、高精度接触动力学求解与异形结构模拟的隔离技术栈。该中枢引擎支持模块化扩展与多方协同,推动全球底层开发环境走向一体化整合。中国企业光轮智能作为核心成员接入技术指导委员会,依托自主闭环的求解校准、参数测量与世界生成体系,为标准化资产库与工业级诊断测试提供关键节点支撑。
技术标准窗口期的抢占通常决定后续产业生态的控制权。物理交互模拟正从单一工具演变为统一定义环境表征、数据生产逻辑与算法评估尺度的核心底座,技术竞争实质上升维为世界构建规则的博弈。当前全球仿真基础设施正处于范式确立前夕,底层开放协议的共建已为中国技术力量提供参与顶层设计的战略契机,持续驱动物理智能向标准化、规模化路径迈进。
原文和模型
【原文链接】 阅读原文 [ 5027字 | 21分钟 ]
【原文作者】 机器之心
【摘要模型】 qwen3.6-plus
【摘要评分】 ★★★★☆

© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章

暂无评论...

