文章摘要
【关 键 词】 电子皮肤、触觉感知、仿生设计、机器人技术、神经形态
香港城市大学研究团队开发出一种名为神经形态机器人电子皮肤(NRE-skin)的创新技术,该技术通过模仿人类神经系统的工作方式,实现了机器人在触觉感知方面的重大突破。NRE-skin采用分层神经形态架构,使触觉信号无需传输至中央处理器即可在皮肤内部完成初步处理和脉冲编码,从而显著提升了反应速度和效率。
这项技术的核心在于将触觉信息直接转化为神经元式的脉冲信号,不同于传统电子皮肤的模拟信号采集方法。每个压力传感器与微型振荡电路集成,通过电阻变化调控脉冲频率,实现了压力强度到脉冲频率的直接转译。此外,每个传感器配备独特的无源元件作为“位置指纹”,使得脉冲信号在形状、宽度或幅度上具有独特特征,从而精确定位触觉来源。
NRE-skin的设计灵感来源于人类皮肤的四层结构,包括封装层、传感层、电路层和基底层。电路层作为核心处理模块,进一步细分为疼痛中心、特征中心、信号整合器、脉冲发生器和连接器,模拟了生物感觉处理机制。这种分层结构实现了信号的渐进降维和数据流简化,显著提升了系统的处理效率。
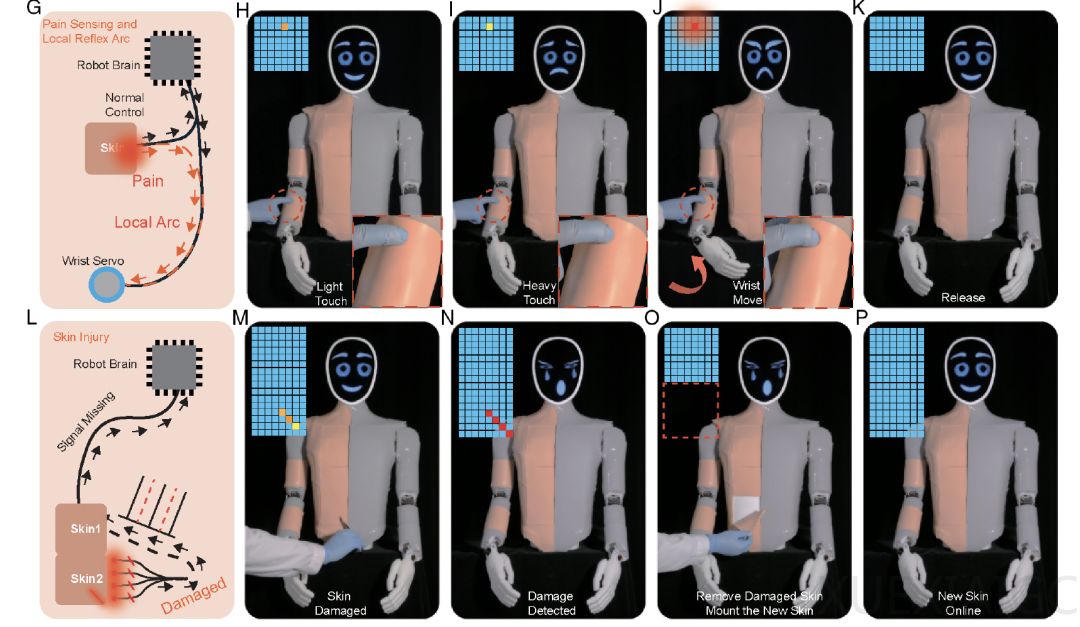
该技术具备两项关键高级功能:主动疼痛感知与局部反射机制,以及损伤自检与模块化维护。当压力超过预设阈值时,系统会触发类似脊髓反射弧的机制,实现毫秒级的即时保护动作。同时,通过检测传感器的“活脉冲”状态,NRE-skin能够精确自检和定位皮肤损伤,结合模块化快拆设计,大大简化了维护流程。
这项研究的负责人高育育博士来自香港城市大学,专注于触觉感知和柔性电子领域的研究。NRE-skin不仅提升了机器人的触觉感知能力,还为未来开发更安全、更具人性化的仿人机器人提供了重要的工程基础。该技术的突破性进展有望在机器人领域引发新一轮的技术革新。
原文和模型
【原文链接】 阅读原文 [ 1671字 | 7分钟 ]
【原文作者】 量子位
【摘要模型】 deepseek/deepseek-v3-0324
【摘要评分】 ★★★★☆


相关文章


