文章摘要
英伟达、CMU和Berkeley联合推出了具身智能Autoresearch框架ENPIRE,旨在让AI智能体自主进行机器人研究。该框架允许多个编码智能体各自控制机器人,独立完成文献阅读、算法修改、策略训练、实验部署与结果分析的全流程,实现全天候无人值守的自我改进。
ENPIRE的核心在于构建了一套自动化实验台基础设施,包含环境、策略改进、部署测试和进化四个模块。其中环境模块成功解决了物理世界中实验场景自动复位与自动评分的难题,将复杂的现实环境转化为智能体可反复调用和持续优化的标准实验平台。这与仅在数字世界中运行的代码自动研究不同,它通过固化的标准接口赋予了物理世界类似软件开发环境的可迭代性。
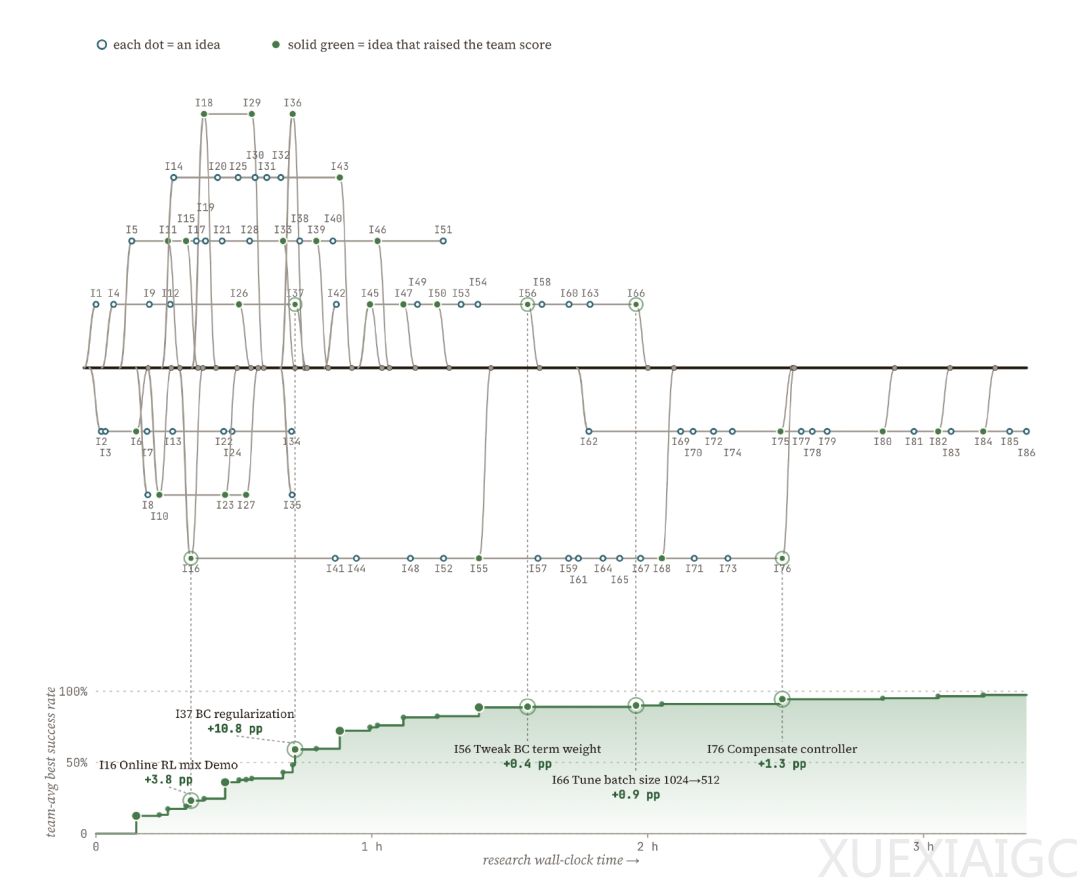
在四个高难度灵巧操作任务的验证中,机器人均达到了百分之九十九的成功率。研究发现,智能体能够像人类研究员一样自主探索研究路径,通过提出假设、真实验证和不断迭代来提升性能,甚至能根据任务特点主动调整系统架构和研究路线。此外,多智能体协作展现了物理世界的扩展性,显著缩短了任务达标时间,且智能体积累的研究经验可以转化为文本总结,直接迁移至其他任务中以提升后续研究效率。
ENPIRE首次将自主研究从数字沙盒引入具身物理世界,补齐了机器人领域发展路径中自主研究阶段的空白。该项目计划全面开源,为构建自动运行的机器人实验室提供了理论基础与技术框架,标志着具身智能在向大语言模型发展路径看齐的过程中迈出了关键一步,展现了研究过程本身具备的可扩展性与经验传承能力。
原文和模型
【原文链接】 阅读原文 [ 3021字 | 13分钟 ]
【原文作者】 量子位
【摘要模型】 qwen3.7-max
【摘要评分】 ★★★★★

© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章

暂无评论...

