CVPR 2024 | 零样本6D物体姿态估计框架SAM-6D,向具身智能更进一步
文章摘要
【关 键 词】 物体姿态、零样本、实例分割、泛化能力、点集匹配
物体姿态估计在现实世界应用中具有重要意义,如具身智能、机器人灵巧操作和增强现实等。在这一领域,研究热点从实例级别6D姿态估计转向类别级别6D姿态估计,再到更具泛化性的零样本6D姿态估计。零样本6D姿态估计旨在通过给定任意物体的CAD模型,在场景中检测目标物体并估计其6D姿态。尽管具有重要意义,这种任务在物体检测和姿态估计方面面临巨大挑战。
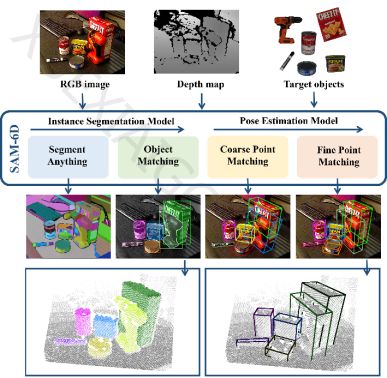
最近,分割一切模型SAM受到关注,其出色的零样本分割能力为零样本6D物体姿态估计任务提供了可靠的支撑。研究人员提出了一个新颖的零样本6D物体姿态估计框架SAM-6D,该框架通过实例分割和姿态估计两个步骤实现目标。SAM-6D利用分割一切模型的零样本分割能力,生成候选对象,并设计物体匹配分数以识别目标物体。姿态估计则采用局部到局部的两阶段点集匹配过程。
SAM-6D的技术贡献包括:创新的零样本6D姿态估计框架,优秀的泛化能力,以及新颖的物体匹配分数和两阶段点集匹配模型。实例分割模型(ISM)利用SAM的零样本迁移能力生成候选对象,并计算物体匹配分数。姿态估计模型(PEM)预测候选对象的6D姿态,采用Background Token设计和稀疏到稠密点集变换器。
实验结果表明,SAM-6D在BOP七个核心数据集上的实例分割和姿态估计表现优异,展现了强大的泛化能力。SAM-6D的更多实现细节可以在原论文中找到。
原文和模型
【原文链接】 阅读原文 [ 2376字 | 10分钟 ]
【原文作者】 机器之心
【摘要模型】 moonshot-v1-32k
【摘要评分】 ★★★★☆

© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章

暂无评论...

