文章摘要
4 月 22 日至 24 日,FAIR plus 机器人全产业链接会在深圳会展中心举行。作为全球领先的超短距毫米波连接芯片设计公司,德氪微电子亮相展会,展示了面向机器人关节的毫米波非接触互连芯片方案,重点展出多种非接触旋转通信与供电模组。这意味着,机器人关节间的连接方式正从依赖接触式器件与复杂布线,转向更适合动态运行、系统集成与长期稳定工作的实现路径。 现场通过灵巧手、夹爪、关节等演示样本,呈现了该方案在机器人关节间的应用场景,并延展至雷达、转台等其他需要非接触旋转通信与供电的高可靠性场景。结合实物展示及零件拆解,观众可直观了解模组在关节结构中的集成方式与适配方向,现场也就结构集成、协议适配等问题展开交流。
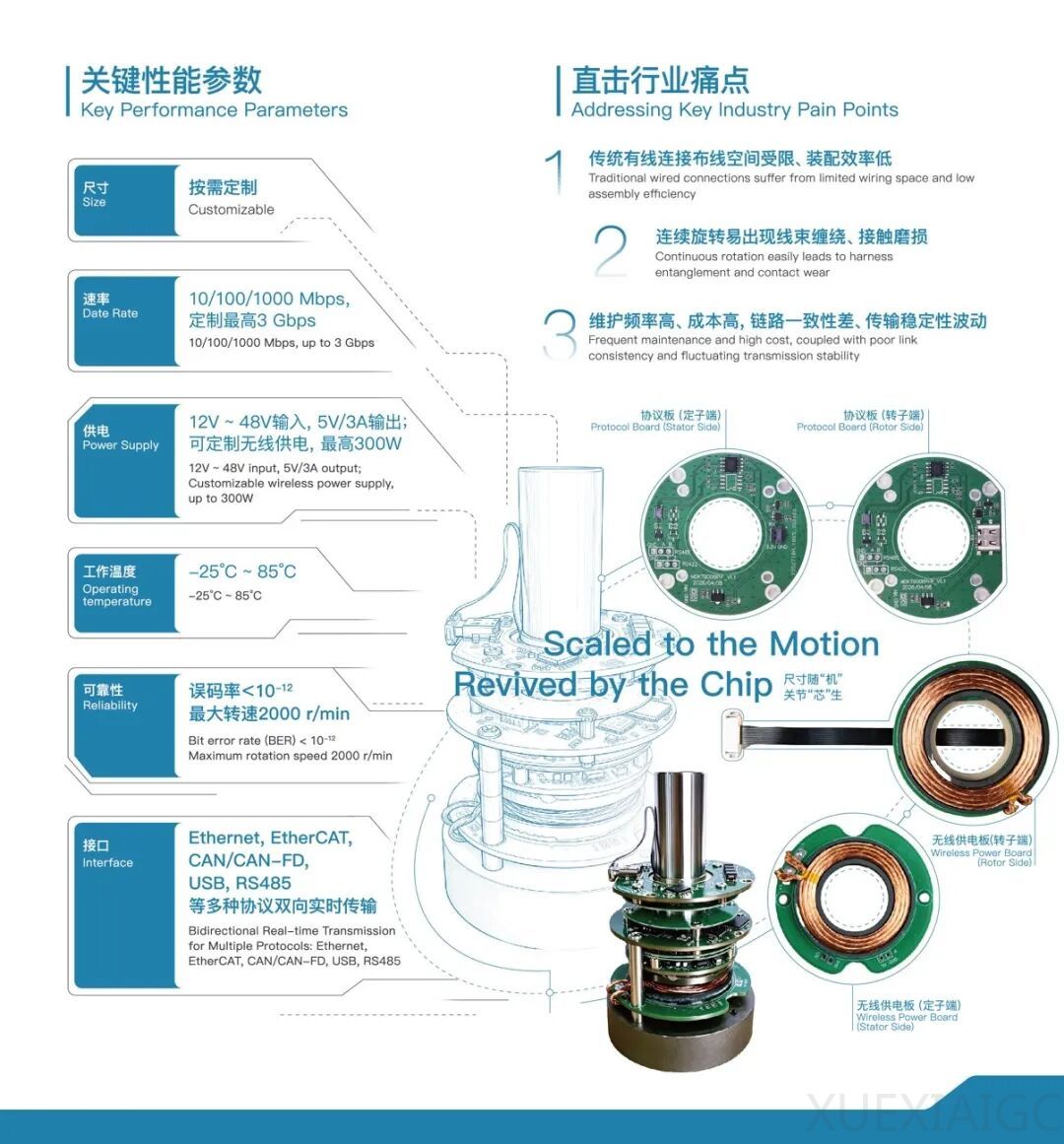
对于机器人系统而言,关节不仅是运动执行单元,也是数据传输、控制协同与供电连接的重要节点。随着机器人结构复杂度提升,关节间连接在布线空间、装配效率、长期磨损、维护频率及链路一致性等方面面临更高要求。尤其在连续旋转、多自由度运动及长期动态运行条件下,传统有线连接方案往往需要应对线束缠绕、触点磨损、维护更换及稳定性波动等问题。 针对此类需求,德氪微毫米波互连芯片方案可通过非接触方式实现通信与供电连接,减少机械接触点及复杂线束约束,提升动态运行条件下的连接稳定性、集成效率与长期一致性。
该方案支持 Ethernet、EtherCAT、CAN/CAN-FD、USB、RS485 等多种协议的双向实时传输,适配机器人关节、灵巧手等多类动态连接场景。通信侧支持 10 / 100 / 1000 Mbps,在定制接口与结构配置下,通信速率最高可扩展至 3 Gbps。 目标误码率小于 10⁻¹²,最大转速可达 2000 r/min,工作温度范围覆盖 -25°C 至 85°C,支持模组化扩展。德氪微表示,随着机器人及具身智能应用发展,关节连接方案正从单一连通能力转向对稳定性、集成度和长期运行能力的综合要求。公司已推出包括毫米波无线 EtherCAT 模组、无线 Ethernet 模组等产品,将持续推动非接触互连技术在机器人动态场景中的落地。
原文和模型
【原文链接】 阅读原文 [ 955字 | 4分钟 ]
【原文作者】 半导体行业观察
【摘要模型】 qwen3.5-397b-a17b
【摘要评分】 ★☆☆☆☆


相关文章


