文章摘要
【关 键 词】 智能体、七层架构、约束绑定、模型外壳、系统工程
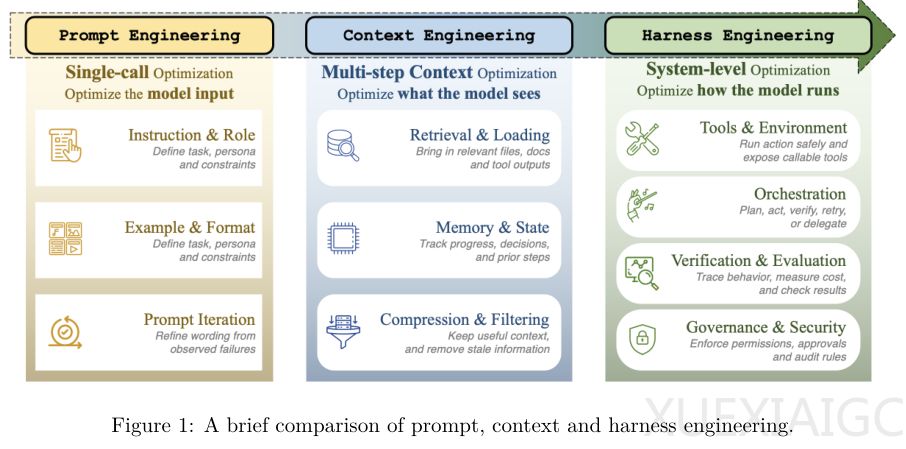
决定人工智能智能体在真实场景中可靠运行的核心因素,已从底层大模型转向包裹模型的外部执行外壳。研究提出约束绑定假说,指出在多步骤与工具密集的长周期任务中,系统表现主要受外部基础设施制约,而非模型自身能力。模型仅充当推理引擎,外部架构才是决定智能体行为边界与任务成功率的核心硬约束。开发者关注焦点正经历从提示词工程、上下文工程向系统性工程的演进。
为系统化解决复杂性,研究团队基于百余开源项目拆解出ETCLOVG七层架构。该架构涵盖执行环境与沙箱、工具调用协议、上下文分级管理、生命周期编排、全链路可观测性、闭环验证评估以及治理安全控制。每一层均针对生产环境痛点设计,例如通过内存分级理念管理长短记忆,利用动态权限与声明式规则拦截越权操作,并将评测对象从单一模型扩展至整体系统组合。固定模型权重仅优化外部中间件与验证拦截机制,即可使基准测试成绩实现数倍跃升。
各层架构在实际部署中呈现高度耦合特征,面临成本、质量与速度的不可能三角博弈。提升安全隔离与验证深度必然增加延迟与算力消耗,而扩大工具权限与记忆容量则会扩展系统风险边界。当前行业仍需在微虚拟机隔离技术、上下文信息无损压缩、自动化故障归因以及跨系统状态交接协议等方向取得突破。未来稳健运行的人工智能绝非单一参数集合,而是集成底盘、制动与精密监控的完整工程化系统。掌握多层架构边界与耦合规律,将成为构建下一代基础设施的关键路径。
原文和模型
【原文链接】 阅读原文 [ 3043字 | 13分钟 ]
【原文作者】 AIGC开放社区
【摘要模型】 qwen3.6-max-preview
【摘要评分】 ★★★★☆

© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章

暂无评论...

