文章摘要
【关 键 词】 具身智能、动作模型、眸深智能、物理智能、世界模型
通用人工智能的竞争正从虚拟数字空间向真实物理世界延伸,具身智能与机器人大脑成为行业核心决胜点。针对当前主流模型在空间感知、物理逻辑及真机落地等方面存在的痛点,复旦系科创企业眸深智能正式推出STI-WM时空一体世界动作模型。该模型作为专为机器人原生打造的通用具身大脑,以时空一体化建模、物理一致性约束和端到端原生融合为核心,致力于开辟物理世界通用人工智能落地的技术路径。
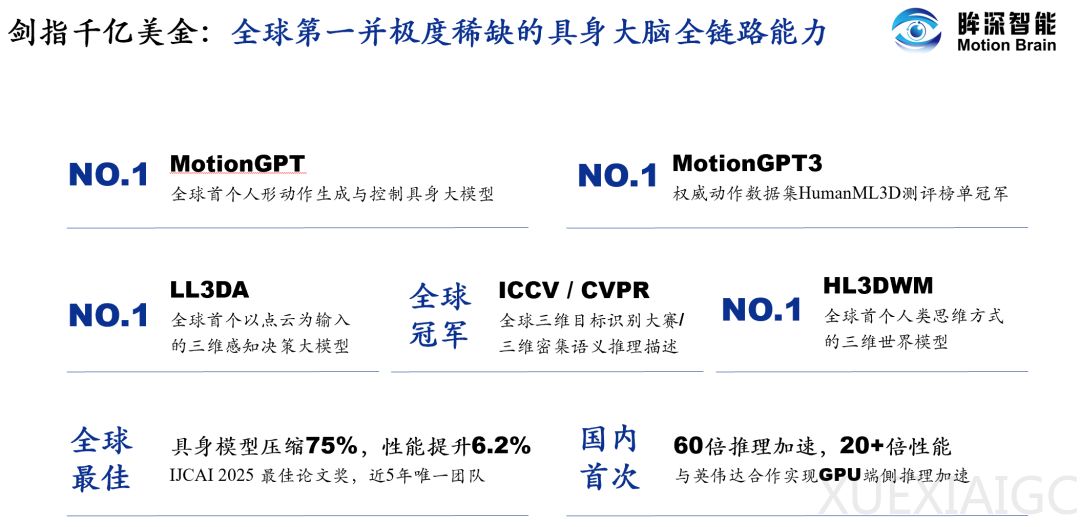
眸深智能的技术突破依托于深厚的学术积淀与全栈工程能力。核心团队由复旦大学、英特尔和英伟达的专家组成,超九成研发人员来自复旦大学。团队在世界模型、三维感知等底层技术上深耕五年,斩获多项全球顶尖赛事冠军与学术荣誉,其原创成果获国际顶尖实验室引用,学术与工程能力稳居全球第一梯队。
在技术路线上,眸深智能摒弃了通用世界模型与视觉语言动作模型拼接的模式,确立世界动作模型原生融合路线。STI-WM模型实现了空间结构、时间演化、物理一致性与执行鲁棒性的四维统一,构建出理解世界、推演未来、规划动作到执行纠错的完整物理智能闭环。该模型具备时空一体化原生建模、原生三维感知、内置物理一致性引擎、长时程高阶规划、端侧轻量化部署及小样本强泛化等技术壁垒,有效解决了传统模型落地困难的问题。
在商业化与产业化方面,眸深智能迎来高速发展。公司在半年内完成五轮融资,其中三亿元Pre-A轮融资获得超额认购,并与多家行业头部企业及千亿级产业龙头达成战略合作,技术落地覆盖工业制造、居家康养等多元真实场景。未来,该企业将持续迭代模型体系,全面赋能各类机器人硬件,加速通用具身智能的规模化落地,推动原生物理人工智能技术的发展。
原文和模型
【原文链接】 阅读原文 [ 2227字 | 9分钟 ]
【原文作者】 量子位
【摘要模型】 qwen3.7-max
【摘要评分】 ★★★★★


相关文章


